袁明星
基本信息
姓名:袁明星
性别: 男
所属部门: 机器人与信息自动化研究所
行政职务:
职称: 副教授/博士生和硕士生导师
学历: 博士
所学专业: 机械电子工程
办公电话:
电子邮件: [email protected]
研究方向: 人机交互;机器人智能感知、规划与控制;
个人简介
2023.01-至今: 南开大学,副教授
2019.06-2022.12: 南开大学,讲师
2016.11-2017.11:美国普渡大学机械工程学院联合培养博士生
2013.09-2019.03:浙江大学,机械电子工程,工学博士
2009.09-2013.06:南京航空航天大学,飞行器制造工程,工学学士
南开大学机器人自主行为与人智协同研究团队(Robot Autonomy and Human-AI Collaboration, RaHAIC)核心成员,团队创始人、指导专家为方勇纯教授,团队负责人为张雪波教授。
课题组主页:https://rh.nankai.edu.cn/index.htm
实验室常年招收优秀本科生开展科创项目研究,请有意向的本科生直接与我联系。
2023年秋季推免还有1个保研名额,欢迎感兴趣的优秀同学加入机器人自主行为与人智协同研究团队。
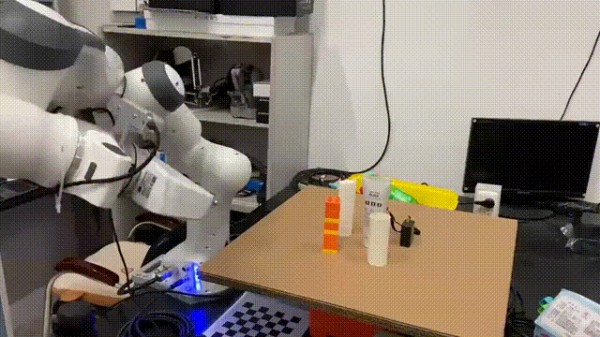
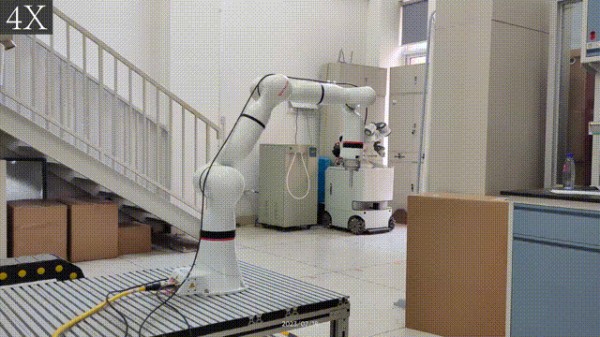
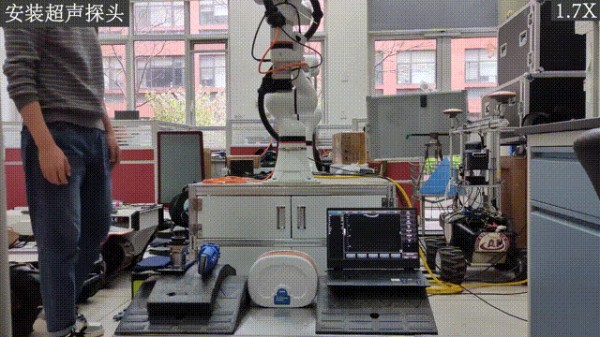
研究方向聚焦人机交互与智能操作,系统性地涵盖机器人感知、规划与控制三个层面。感知层面包括视觉目标识别与定位、作业场景三维重建与视觉无序抓取;规划层面包括场景探索、避碰路径规划与时间最优轨迹规划;控制层面包括高精协同运动控制与柔顺交互力控。应用场景包括医疗超声扫查、伤患康复辅助训练、工件或包裹分拣、电网作业等。
1. 机器人智能感知



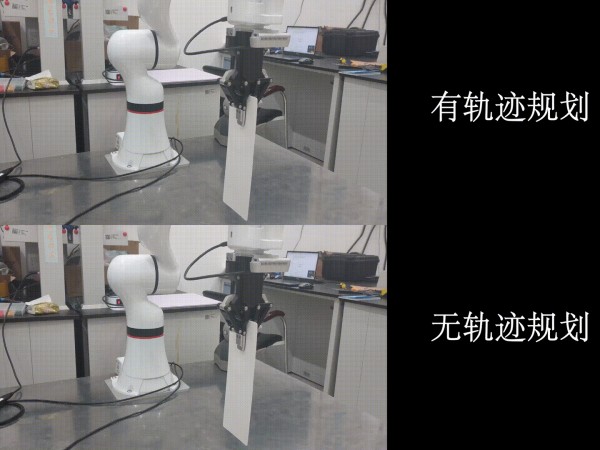
2.机器人运动规划
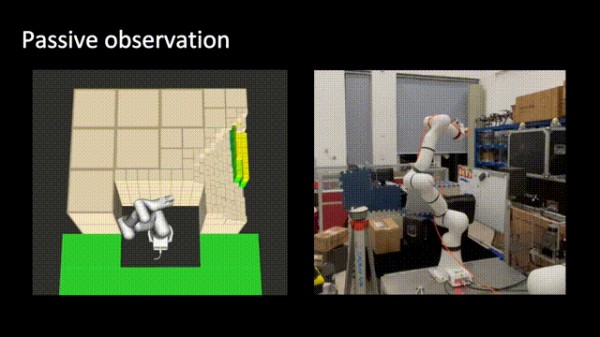
3.机器人智能控制
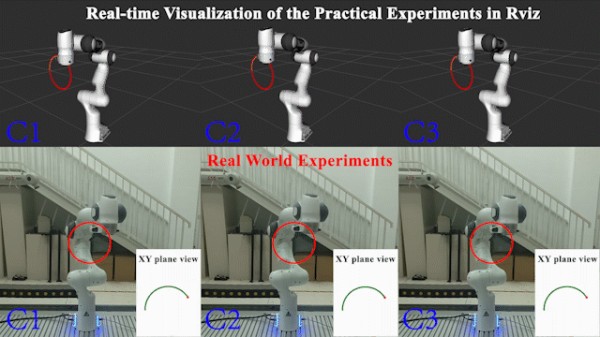
瞬时强干扰(幅值超过控制输入极限,持续时间短)下机械臂偏离轨迹最短时间复原(C3为我们所提方法)
科研项目、成果、获奖、专利
科研项目:
技术委托项目,200万,项目负责人;
天津市自然科学基金青年项目,5万,项目负责人;
国家自然科学基金面上项目,50万,项目负责人;
国家级项目,180万,项目负责人;
国家重点研发计划“青年科学家”项目,60万,任务负责人。
国家自然科学基金青年项目,24万,项目负责人。
中国博士后科学基金第67批面上项目,8万,项目负责人。
流体动力与机电系统国家重点实验室开放基金,5万,项目负责人。
专利:
1. 张雪波,周燕玲,袁明星,赵铭慧,苑晶,一种考虑机械臂运动约束的三维重建中相机位姿估计方法,发明专利,授权号2022107077742;
2. 张雪波,周燕玲,袁明星,赵铭慧,基于深度相机的自主识别智能抓取方法及系统,发明专利,授权号2021106487872。
撰写论文、专著、教材等
近期发表的主要论文
M. Yuan and X. Zhang, Minimum-time Transient Response Guaranteed Control of Servo Motor Systems with Modeling Uncertainties and High-order Constraint, IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, DOI: 10.1109/TCSII.2022.3227332. (SCI)
M. Yuan and X. Zhang, Stability and fast transient performance oriented motion control of a direct-drive system with modeling uncertainties, velocity and input constraints, IEEE/ASME Transactions on Mechatronics, 2022, 27(6): 5926 - 5935. (SCI, TOP期刊)
M. Yuan and X. Zhang. Towards Fast Trajectory Recovery for Servo Motor Systems under Instantaneous Large Disturbance. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(8): 3595 – 3599 (SCI)
M. Yuan, Z Chen, B Yao, et al. Fast and Accurate Motion Tracking of a Linear Motor System under Kinematic and Dynamic Constraints: an Integrated Planning and Control Approach. IEEE Transactions on Control Systems Technology, 2021, 29(2): 804-811. (ESI高被引论文, SCI)
M. Yuan, Z Chen, B Yao, et al. A general online trajectory planning framework in the case of desired function unknown in advance. IEEE Transactions on Industrial Informatics, 2019, 15(5): 2753-2762. (SCI,TOP期刊)
M. Yuan, Z Chen, B Yao, et al. An improved online trajectory planner with stability-guaranteed critical test curve algorithm for generalized parametric constraints. IEEE/ASME Transactions on Mechatronics, 2018, 23(5): 2459-2469. (SCI,TOP期刊)
M. Yuan, Z Chen, B Yao, et al. Time optimal contouring control of industrial biaxial gantry: A highly efficient analytical solution of trajectory planning. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 247-257. (ESI高被引论文,SCI,TOP期刊)
M. Yuan, Z. Chen, B. Yao and J. Hu. Online Trajectory Planning based Motion Control of a Teleoperation Robot System, 2018 IEEE International Conference on Information and Automation, Wuyishan, China, Aug. 2018. (EI & Best Paper Award Finalist)
M. Yuan, B. Yao and X. Zhu. An efficient computation algorithm for time optimal trajectory planning with physical constraints, 2015 IEEE International Conference on Information and Automation, pp.31003105, Lijiang, China, Aug. 2015. (EI)
M. Yuan, B. Yao, D. Gao, X. Zhu and Q. Wang. A novel algorithm for time optimal trajectory planning, 2014 ASME Dynamic Systems and Control Conference, pp. V001T02A003, San Antonio, Texas, USA, Oct. 2014. (EI)
Z. Chen, C. Li, B. Yao, M. Yuan and C. Yang. Integrated coordinated/synchronized contouring control of a Dual-Linear-Motor-Driven Gantry, IEEE Transactions on Industrial Electronics, DOI: 10.1109/TIE.2019.2921287. (SCI, TOP期刊)
J. Hu, Z. Chen, M. Yuan and B. Yao. Adaptive Robust Control of a 7-DoFs Teleoperation Robot System with Payload variations and disturbances, 2018 ASME Dynamic Systems and Control Conference, Atlanta, Georgia, USA, Oct. 2018. (EI)
X. Liu, M. Yuan, Z. Chen, B. Yao and Q. Wang. Constrained Time-optimal Motion Control of a Linear Motor Driven System: Theory and Experiments, The 20th IEEE International Conference on Industrial Technology, Melbourne, Australia, Feb. 2019. (EI)
网址:袁明星 http://c.mxgxt.com/news/view/171100
相关内容
袁莉事件引出明星竞争黑幕袁明星
如何联系袁娅维经纪人?明星代言演出合作
袁鑫怡、外星人音乐
袁莉李冰冰结怨曝娱乐圈明星竞争黑幕
星汉灿烂,袁慎家世真不简单
袁莉事件引出明星竞争黑幕 揭秘娱乐圈上位守则
《云巅之上2》揭女明星上位内幕 陈晓力挺袁姗姗
袁立(袁莉)写真
袁子仪评价
随便看看
最新实时动态
- 粉丝逆袭成嫂子,偶像与追随者界限模糊化
- 从偶像到朋友:科技如何改变我们的追星方式
- 为什么明星热衷干细胞美容?——8个问答带你快速了解
- 国内外明星热衷收藏艺术品:艺术品比演戏挣得多吗
- 为什么明星热衷干细胞美容?——3个问答带你快速了解
- 这本小说的主人公是明星偶像吗?
- 《沉睡花园》其中一个单元剧说的就是偶像明星与粉丝的关系。
- 心理分析恋与偶像,解读偶像与恋爱心理的深层联系
- 明星扎堆南通!梅婷黄奕周雨彤现身寺街,刘若英竟带火了这个神秘美食?
- 李现、白敬亭、王嘉尔同框:看这三种魅力如何引爆你的情感神经!
热点实时动态
- 12061
- 7413
- 7218
- 7056
- 7024
- 6732
- 6297
- 6120
- 6120
- 6103
