要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划和运动控制。在SLAM技术帮助机器人确定自身定位和构建地图之后,进行一个叫做目标点导航的能力。
SLAM技术作为机器人自主移动的关键技术,让很多人都误解为:SLAM=机器人自主定位导航。
其实,SLAM≠机器人自主定位导航 ,不解决行动问题。
这两个层次的规划模块协同工作,机器人就可以很好的实现从A点到B点的智能移动了。不过实际工作环境下,上述配置还不够。因为运动规划的过程中还包含静态地图和动态地图两种情况。
A*算法
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。但是,A*算法同样也可用于动态路径规划当中,只是当环境发生变化时,需要重新规划路线。
D*算法
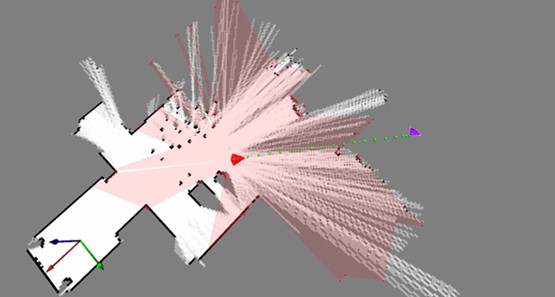
D*算法则是一种动态启发式路径搜索算法,它事先对环境位置,让机器人在陌生环境中行动自如,在瞬息万变的环境中游刃有余。D*算法的最大优点是不需要预先探明地图,机器人可以和人一样,即使在未知环境中,也可以展开行动,随着机器人不断探索,路径也会时刻调整。
上述的几种算法都是目前绝大部分机器人所需要的路径规划算法,能够让机器人跟人一样智能,快速规划A到B点的最短路径,并在遇到障碍物的时候知道如何处理。但扫地机器人作为最早出现在消费市场的服务机器人之一,它需要的路径规划算法更为复杂。
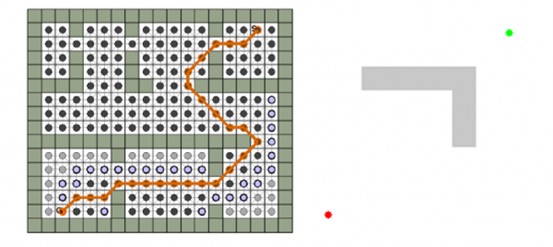
空间覆盖(space coverage)
扫地机器人所需要的功能跟市面上的机器人有所不同,比如针对折返的工字形清扫,如何有效进行清扫而不重复清扫?如何让扫地机和人一样,理解房间、门、走廊这种概念?
针对这些问题,学术界长久以来有一个专门的研究课题,叫做空间覆盖(space coverage),同时也提出了非常多的算法和理论。其中,比较有名的是Morse Decompositions,扫地机通过它实现对空间进行划分,随后进行清扫。
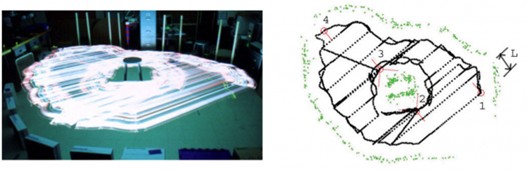
所以,他要实现的不是尽快实现从A到B的算法,为了家里能尽量扫得干净,要尽量覆盖从A到B点的所有区域,实现扫地机器人“扫地”的这个功能。
所以,机器人自主定位导航技术的发展还需要越来越多的技术加以支撑,适用于更多的场景。虽然技术和需求在变,但不变的是,在行业中取长补短,结合不同新的技术进行融合,这是不会改变的事实。返回搜狐,查看更多
责任编辑:

