Starlink卫星星箭分离后的轨道控制分析
发布时间:2024-12-15 20:59
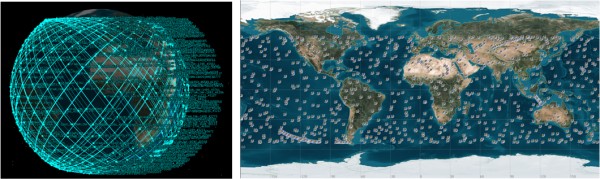
截至2021年2月3日,SpaceX有961个Starlink卫星在轨,左下图三维空间图可以看出这些卫星运行在不同轨道面、每个轨道面有一定的夹角;右下图二维地图表明这些卫星均匀分布在纬度±53°范围内,可以为地面通信提供良好覆盖。
 由于要形成多个轨道面,与目前很多近地卫星依靠火箭一次入轨不同,SpaceX采用猎鹰9号火箭一次将60颗星链卫星送入约280km高度的中间轨道,剩下的工作就交给地面测控系统,由它将这60颗卫星分布在间隔20°、高度550km的3个轨道面,每个轨道面内20颗卫星、相位间隔18°。 为完成上述星座构型建立和维持任务,地面测控系统利用星上轨控装置,进行卫星轨道面控制和相位控制,发挥了重要作用。1、Starlink轨控推进装置 卫星轨控推进装置用于产生推力,改变卫星轨道。Starlink卫星的轨控推进装置是4台霍尔离子电推器,安装位置如左下图所示,右下图是工作状态下的推进器喷嘴,它是世界上第一个使用氪离子推进器的卫星,尽管效率低于常用的氙离子推进系统,但其价格仅为氙的十分之一。
由于要形成多个轨道面,与目前很多近地卫星依靠火箭一次入轨不同,SpaceX采用猎鹰9号火箭一次将60颗星链卫星送入约280km高度的中间轨道,剩下的工作就交给地面测控系统,由它将这60颗卫星分布在间隔20°、高度550km的3个轨道面,每个轨道面内20颗卫星、相位间隔18°。 为完成上述星座构型建立和维持任务,地面测控系统利用星上轨控装置,进行卫星轨道面控制和相位控制,发挥了重要作用。1、Starlink轨控推进装置 卫星轨控推进装置用于产生推力,改变卫星轨道。Starlink卫星的轨控推进装置是4台霍尔离子电推器,安装位置如左下图所示,右下图是工作状态下的推进器喷嘴,它是世界上第一个使用氪离子推进器的卫星,尽管效率低于常用的氙离子推进系统,但其价格仅为氙的十分之一。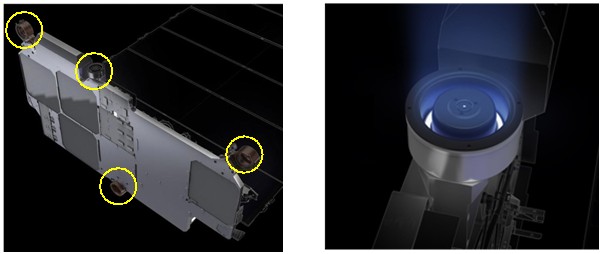
将星箭分离时聚集在一起的60颗卫星分布在间隔20°的3个轨道面、每个轨道面内20颗卫星、高度550km。2.2 控制策略 (1)直接法 直接控制法是利用运载或卫星轨控发动机实现轨道面修正,它可以快速形成目的轨道面。下表是以北斗导航卫星上的490N轨控发动机为例,计算550km高度的轨道面控制参数。从表中可以看出,要对20颗卫星完成20°轨道面修正,需要发动机连续工作6.24个小时或者提供2117.3m/s的速度增量,而现有条件无法做到,这就是为什么猎鹰9号火箭只负责将卫星送入280km、不负责后续轨道面修正的主要原因。
高度(km)
i
(°)
推力(N)
卫星质量(kg)
升交点变量(°)
发动机工作时长(h)
对应的速度增量(m/s)
550
53.1
490
5200
20
6.24
2117.3
(2)相对法相对控制法是地面测控系统通过控制不同卫星的轨道高度,利用地球摄动力作用和时间积累,形成卫星间的轨道面差。下表是根据Starlink卫星参数计算的结果,它表明运行在350km卫星的轨道平面和550km卫星的轨道平面之间每天变化0.485°,经过41天,两个轨道面差达到20°;经过82天,两个轨道面差达到40°。
高度(km)
倾角(°)
两个轨道面进动率差
(°/天)
41天轨道面差(°)
82天轨道面差(°)
350
53.1
550
53.1
0.485
20
40
2.3 控制过程
猎鹰9号火箭一次将60颗卫星送入约280km高度后,这些卫星被分成3批、每批20颗,分别实施控制,具体如下: (1)第一批20颗卫星直接从入轨后的约280km高度抬高到550km目标高度 第一批卫星从280km开始持续控制,约45天后达到550km高度后维持不变,如下图所示。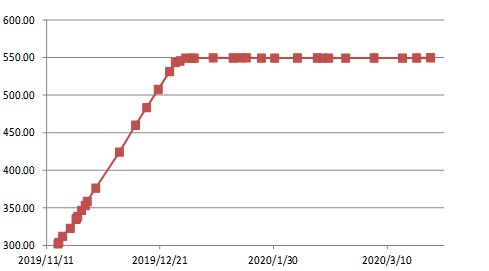 (2)第二批20颗星维持在350km高度41天,形成与第一批轨道面相差20° 第二批卫星的轨道高度从约280km开始持续控制,11天后到达350km高度,如左图中第一段所示。在350km高度维持近41天后,如左图中第二段所示,形成与第一批轨道面相差20°,如右图所示。然后继续抬高轨道,34天后达到550km高度,如左图中第三段所示。
(2)第二批20颗星维持在350km高度41天,形成与第一批轨道面相差20° 第二批卫星的轨道高度从约280km开始持续控制,11天后到达350km高度,如左图中第一段所示。在350km高度维持近41天后,如左图中第二段所示,形成与第一批轨道面相差20°,如右图所示。然后继续抬高轨道,34天后达到550km高度,如左图中第三段所示。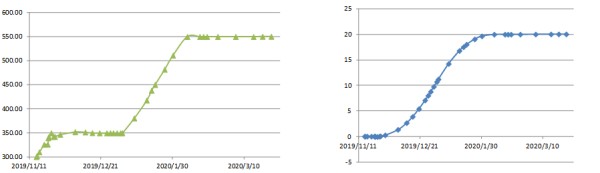 (3)第三批卫星维持在350km高度82天,形成与第一批轨道面相差40° 第三批卫星的轨道高度从280km开始持续控制,11天后到达350km高度,如左图中第一段所示,维持近82天,如左图中第二段所示,形成与第一批轨道面相差40°,如右图所示。然后继续抬高轨道,34天后达到550km高度,如左图中第三段所示。
(3)第三批卫星维持在350km高度82天,形成与第一批轨道面相差40° 第三批卫星的轨道高度从280km开始持续控制,11天后到达350km高度,如左图中第一段所示,维持近82天,如左图中第二段所示,形成与第一批轨道面相差40°,如右图所示。然后继续抬高轨道,34天后达到550km高度,如左图中第三段所示。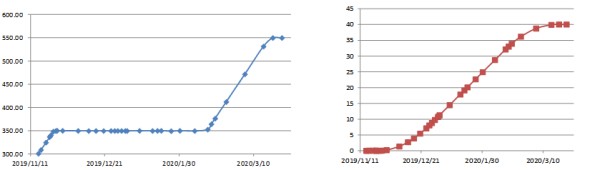 卫星入轨127天后,星座构型完成,所有卫星高度达到550km,如左下图所示;3个轨道面间相差20°,如右下图所示。
卫星入轨127天后,星座构型完成,所有卫星高度达到550km,如左下图所示;3个轨道面间相差20°,如右下图所示。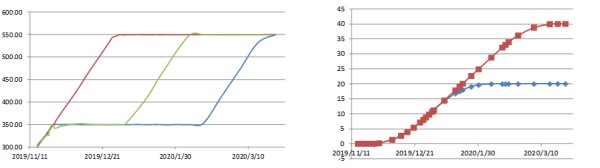 2.4 控制效果 左下图是Starlink卫星入轨时一个轨道面真实情况,右下图是在地面测控系统实施4个月控制后,形成了3个轨道面的真实情况。
2.4 控制效果 左下图是Starlink卫星入轨时一个轨道面真实情况,右下图是在地面测控系统实施4个月控制后,形成了3个轨道面的真实情况。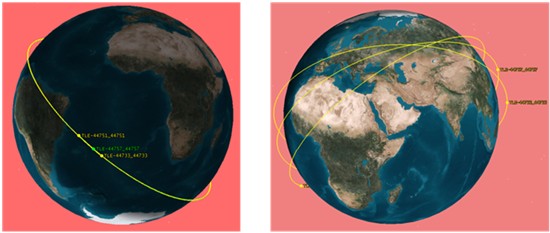 3、Starlink相位控制3.1 控制目标 将星箭分离时聚集在一起的20个卫星均匀分布在一个轨道面内,卫星间相位间隔为360°/20=18°。3.2 控制策略 通过改变卫星相互之间的高度差,形成漂移速度,通过时间积累来获得所需要的相位差值。下表是不同轨道高度、位于同一轨道面的两个卫星之间高度差为3.2km引起的相位差漂移速度的计算结果。可以看出平均漂移速度约为3.9°/天,那么两个初始在一起的卫星,经过大约46天,它们的相位差达到46*3.9°=180°,实现了一个轨道面均匀分布目的。
3、Starlink相位控制3.1 控制目标 将星箭分离时聚集在一起的20个卫星均匀分布在一个轨道面内,卫星间相位间隔为360°/20=18°。3.2 控制策略 通过改变卫星相互之间的高度差,形成漂移速度,通过时间积累来获得所需要的相位差值。下表是不同轨道高度、位于同一轨道面的两个卫星之间高度差为3.2km引起的相位差漂移速度的计算结果。可以看出平均漂移速度约为3.9°/天,那么两个初始在一起的卫星,经过大约46天,它们的相位差达到46*3.9°=180°,实现了一个轨道面均匀分布目的。高度
(km)
半长轴差(km)
漂移率(°/d)
350
3.2
-4.0
450
3.2
-3.9
500
3.2
-3.8
3.3 控制过程 Starlink编号为44751和44758卫星入轨后,两个卫星的轨道高度差为3.2km,如左下图 15所示,这期间的相位漂移率约为3.9°/天,如右下图。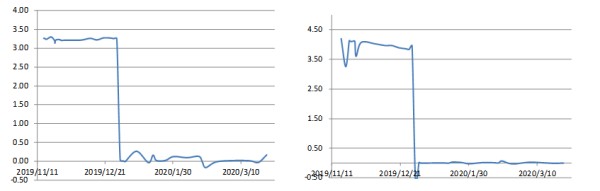 两个卫星维持上述状态46天后,它们之间的相位差达到180°,如下图所示,地面测控系统调整其中一个卫星的轨道高度,使双星的轨道高度差为0,两个星的相位不再变化,完成了相位控制任务。
两个卫星维持上述状态46天后,它们之间的相位差达到180°,如下图所示,地面测控系统调整其中一个卫星的轨道高度,使双星的轨道高度差为0,两个星的相位不再变化,完成了相位控制任务。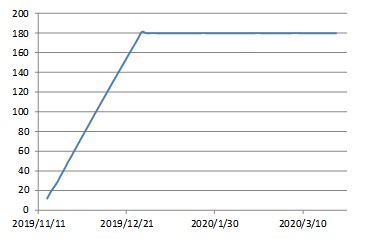 3.4 控制效果 左下图是上述两个Starlink卫星入轨初期在一起的真实状态,右下图是46天完成相位控制后,它们在轨道上均匀分布的真实状态。
3.4 控制效果 左下图是上述两个Starlink卫星入轨初期在一起的真实状态,右下图是46天完成相位控制后,它们在轨道上均匀分布的真实状态。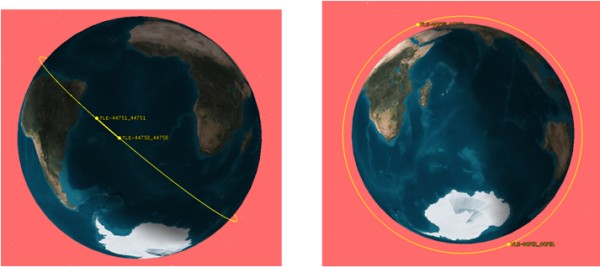 4、卫星测控系统在控制中的作用
4、卫星测控系统在控制中的作用通过上述分析可以看出,采用不同的控制策略,星座构型的代价是不一样的,Starlink卫星通过分阶段提升轨道高度和时间积累完成了星座构型,付出的是时间代价,这其中地面测控系统起了关键作用,地面测控系统的天线跟踪和数据收发它只是它工作的一部分,测控系统需要长期对每个卫星进行轨道测量和精确计算,计算控制参数,规划每个卫星的氪离子推进器工作时刻和时长,加工成遥控指令上注到卫星,并根据控制效果调整轨控制策略,在星座构型完成后还要进行维持控制。
5、小结 (1)Starlink卫星的发射,Space的猎鹰9号火箭只把卫星送入一定高度的中间轨道,剩下的星座构型建立和保持任务交由地面测控系统完成; (2)地面测控系统控制星上氪离子推进器工作,通过选择不同群卫星的轨道高度和时间积累,将这些卫星在一箭多星发射后按群分布在不同轨道面。 (3)地面测控系统控制星上氪离子推进器工作,通过选择一个群内不同卫星的轨道高度和时间积累,将这些卫星由一箭多星发射后聚集在一起的状态实现均匀分布。 (4)氪离子推进器第一次入轨工作,根据推算,Starlink卫星携带的氪离子推进系统的常规轨道控制能力约为5.9km/天,对应速率增量为每天3.2m/s。网址:Starlink卫星星箭分离后的轨道控制分析 http://c.mxgxt.com/news/view/200806
相关内容
低轨卫星测控技术分析之一:Globalstar卫星轨道现状和控制历程Starlink星座第一期第一阶段轨道部署情况分析
关于Starlink星座轨道资源竞争的观察
Starlink 星座应用现状及分析
SpaceX Starlink星座主导全球高通量卫星通信市场,竞争对手探索多样化应对策略
元宇宙StarLink星链
星链启动:乌克兰利用Starlink设备保持互联网联接
Google、AT&T 和 Vodafone 向 Starlink 竞争对手投资 2 亿美元
6G=5G+卫星通讯?关于未来,你想知道的都在这里
SPAC之王预测,马斯克今年将让Starlink公开发行
随便看看
最新实时动态
热点实时动态
- 12030
- 7396
- 7202
- 7041
- 7007
- 6718
- 6283
- 6105
- 6105
- 6087

